米尔RK3576 + ROS2 进阶:NPU加速MixFormerV2目标跟随与机械臂抓取实战
关键词:RK3576RK3576核心板RK3576开发板机器人
时间:2026-4-10 14:14:25 来源:米尔
“
回顾上篇:基于RK3576 + ROS2 Humble + SLAM Toolbox + Nav2,我们实现了机器人的建图与自主导航。机器人已经能够“走到哪里”。但真正的智能机器人不仅要“走到哪”,还要“看到并操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能:
”
前言
回顾上篇:基于RK3576 + ROS2 Humble + SLAM Toolbox + Nav2,我们实现了机器人的建图与自主导航。机器人已经能够“走到哪里”。但真正的智能机器人不仅要“走到哪”,还要“看到并操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能:
- • 使用米尔RK3576 NPU加速MixFormerV2进行目标跟踪,替代传统OpenCV算法;
- • 移动底盘跟随目标物体,保持安全距离;
- • 机器人机械臂抓取物体,完成“识别-跟随-抓取”闭环。
名词预先了解:
- • 手眼转换:将相机看到的物体坐标转换到机械臂可执行的坐标系下。
- • 逆运动学:给定末端目标位姿,反解出机械臂各关节应转动的角度。
图:米尔基于RK3576核心板开发板
第一章:系统总体架构与硬件连接
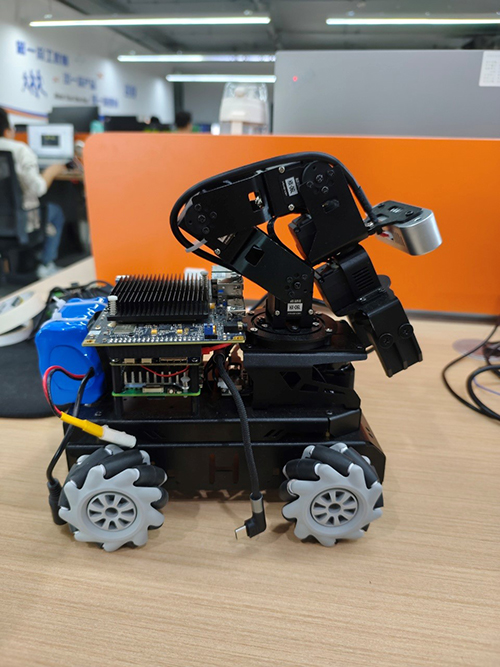
1.1 硬件组成
- • 主控平台:米尔基于RK3576核心板开发板(内置6TOPS NPU)
- • 深度摄像头:RGB-D深度相机(输出RGB、IR、深度三路数据)
- • 机械臂:6轴轻量机械臂(串口控制)
- • 移动底盘:STM32控制,麦克纳姆轮
1.2 软件模块与数据流
整个系统分为五个核心ROS2节点:
|
模块 |
功能 |
输入 |
输出 |
|
camera_driver |
发布RGB和深度图 |
RGB-D相机 |
RGB图像、深度图 |
|
mixformer_tracker |
NPU加速跟踪 |
RGB图 + 初始目标框 |
目标2D框 + 3D坐标 |
|
object_follower |
控制底盘移动 |
目标3D坐标 |
/cmd_vel 速度指令 |
|
grasp_planner |
抓取规划 |
目标3D坐标 + 深度 |
机械臂运动轨迹 |
|
arm_controller |
执行抓取 |
轨迹 |
夹爪状态 |
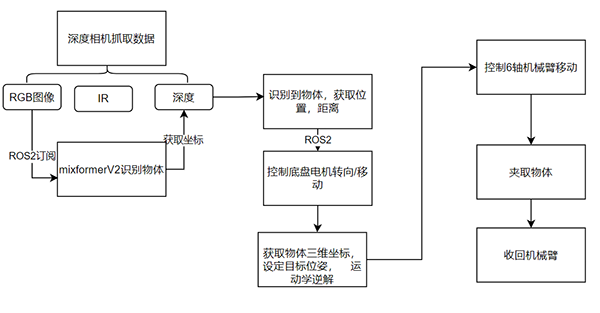
整体数据流:
相机 → MixFormerV2跟踪器 → 手眼转换 → 底盘跟随节点 → 靠近停止 → 机械臂逆运动学规划 → 抓取执行。
第二章:深度相机数据获取
与普通USB摄像头不同,深度相机在ROS2下通过标准驱动节点发布话题数据。本文使用的RGB-D相机输出三路信息:
- • RGB图像:用于目标跟踪的视觉输入
- • IR图像:辅助深度计算(夜间或弱光可用)
- • 深度图像:每个像素的毫米级距离值
相机输出格式为:640×400 NV12,帧率13~15 FPS。主控RK3576通过订阅ROS话题(如 /camera/color/image_raw 和 /camera/depth/image_raw)即可获取数据,无需直接操作 /dev/video* 节点。
关键点:深度图像与RGB图像需要时间对齐和空间对齐(通常相机驱动已提供对齐后的深度图),以便后续将目标2D框映射到3D坐标。
第三章:NPU加速的MixFormerV2目标跟踪
3.1 为什么放弃OpenCV,改用NPU+MixFormerV2?
传统OpenCV跟踪算法(KCF、CSRT等)在光照变化、遮挡、快速运动下容易丢失目标,且完全依赖CPU,帧率受限。而MixFormerV2是一种基于Transformer的端到端跟踪器,精度高、鲁棒性好。配合RK3576内置的6TOPS NPU,可以:
- • 推理速度提升:单帧推理30ms左右,实际跟踪帧率可达15~20 FPS;
- • CPU占用大幅降低:NPU独立处理视觉任务,CPU可专注ROS2通信与运动控制;
- • 功耗更低,适合嵌入式移动机器人。
3.2 模型转换与部署流程
- • 模型转换:下载MixFormerV2的PyTorch权重,使用RKNN-Toolkit2工具转换为 .rknn 格式,并做INT8量化。
- • ROS2节点实现:
- • 订阅RGB图像话题;
- • 将图像缩放至模型输入尺寸(如224×224),进行预处理;
- • 调用NPU推理,输出目标边界框;
- • 结合深度图中对应区域的有效深度值,通过手眼转换得到目标在机器人坐标系下的3D坐标(X, Y, Z);
- • 发布 /target_3d_position 和 /tracking_box 话题。
- • 性能匹配:相机帧率约15 FPS,MixFormerV2采用累计3帧一起推理的方式(batch size=3),单次耗时约70ms,整体匹配流畅。
3.3 手眼转换
本文采用 “眼在手上” 的配置:深度相机固定在机械臂末端,随机械臂一起运动。此时,相机到机械臂末端(camera_link → end_effector_link)的变换是固定的(可通过标定获得),而机械臂末端到基座(end_effector_link → arm_base_link)的变换则随关节角度实时变化。
在ROS中,我们需要:
- • 标定相机到机械臂末端的静态TF。
- • 机械臂驱动节点根据当前关节角度实时发布 end_effector_link → arm_base_link 的动态TF。
- • 通过 tf2 监听完整变换链,将物体坐标从相机系转换到机械臂基座系。
第四章:底盘移动跟随目标
当跟踪节点输出目标在机器人底盘坐标系下的3D位置后,底盘跟随节点 object_follower 执行以下逻辑:
- • 计算相对位置:得到目标相对于机器人中心的水平距离和角度偏差。
- • 优先调整方向:先原地旋转,使机器人正对目标(角度偏差 < 5°)。
- • 前进至抓取距离:保持正对,以线速度向前移动,直到距离目标约0.5米(安全抓取范围)。
- • 停止并通知抓取:到达抓取范围后,发布速度零指令,并触发抓取标志。
第五章:机械臂抓取物体
当底盘停止在抓取距离(约0.5米)后,抓取节点启动。本系统不依赖MoveIt 2,所有机械臂控制通过串口直接下发各关节角度,逆运动学由我们自行实现。
5.1 手眼转换(眼在手上)
相机固定在机械臂末端,因此手眼转换分为两部分:
- • 静态部分:相机到机械臂末端的变换(camera_link → end_effector_link),通过一次标定得到固定值。
- • 动态部分:机械臂末端到基座的变换(end_effector_link → arm_base_link),由机械臂当前关节角度实时决定。
在抓取流程中,目标物体在相机图像中被检测到后,首先得到物体在相机坐标系下的3D坐标,然后通过ROS的tf2监听完整的变换链:camera_link → end_effector_link → arm_base_link,自动转换到机械臂基座坐标系。这一过程无需手动干预,只要机械臂驱动节点正确发布关节状态和TF即可。
5.2 逆运动学解算
六轴机械臂通过串口接收角度指令(每个轴一个角度值)。为了抓取目标点,需要求解逆运动学:已知末端夹爪在机械臂基座下的目标位置(以及期望的姿态,例如垂直向下抓取),反算出6个关节的角度。
- • 实现方式:针对具体机械臂的几何参数(D-H参数),编写解析解或数值迭代解(如雅可比伪逆法)。解析解速度快,适合固定构型;数值法通用但需注意收敛。
- • 输出:6个关节角度(单位:度或弧度),通过串口逐条发送(可同时发送或按顺序移动)。
5.3 抓取流程
- • 获取目标坐标:从跟踪节点读取底盘停止瞬间的目标3D点(已转换到arm_base_link坐标系)。
- • 设定抓取姿态:根据物体形状和相机视角,设定夹爪的期望方向(例如让夹爪水平或垂直接近)。这一步需结合经验预设。
- • 逆运动学求解:输入末端目标位姿,计算出各关节角度。若求解失败(如目标超出工作空间),则调整底盘位置重新跟随。
- • 发送关节角度:通过串口依次发送6个关节的角度指令,等待机械臂运动到位(可简单延时或读取状态反馈)。
- • 夹取:发送夹爪闭合指令(串口另一命令),通过电流反馈或限位开关判断是否夹住物体。
- • 完成:抓取成功后,机械臂保持闭合,底盘可原地等待下一步指令。
第六章:总结与展望
本文在上篇“建图与导航”的基础上,为米尔RK3576机器人增加了“视觉跟随与抓取”能力,实现了完整的“识别-跟随-抓取”闭环。关键技术包括:
- • MixFormerV2 + NPU 实现高能效目标跟踪;
- • 手眼转换:将相机看到的物体坐标转换到机械臂可执行的坐标系下。本文采用“眼在手上”配置(相机固定在机械臂末端),需同时考虑固定偏移和关节运动。
- • 自研逆运动学 控制6轴机械臂精准抓取(不依赖MoveIt 2)。
米尔RK3576这一方案可广泛应用于服务机器人、巡检机器人、教育竞赛等场景。下一步可探索:
- • 多目标切换跟随;
- • 动态避障与跟随并行;
- • 抓取后自动放置(结合上篇的导航回位功能)。
插入视频
演示视频:米尔RK3576机器人方案机械臂抓取演示
猜你喜欢






